Jag ... gillar den här frågan. Först och främst är TLE-uppsättningar nästan värdelösa för exakt sannolikhet för kollisionsuppskattning, eftersom de inte innehåller en uppskattning av osäkerheten i banan, vilket i slutändan är det som påverkar din sannolikhet för kollision.
Så förutsatt du får ett fullständigt meddelande med en högprecisions tillståndsvektor och en tillhörande kovariansmatris (full 6x6-tillstånd är bättre, men 3x3 kan fungera) för varje satellit finns det några saker du kan göra. Det finns en hel del olika metoder för att uppskatta detta, leta upp Alfano och Pateras arbete för några exempel.
Vad problemet brukar bruka komma till är att uppskatta osäkerhetens överlappning vid närmaste tillvägagångssätt. Föreställ dig "osäkerhet" (i tre dimensioner) som en ellipsoid - om du är bekant med sannolikhetsbegrepp är det din multivariata sannolikhetstäthet. Nu kan sannolikheten för kollision ses som mängden överlappning mellan dessa två ellipsoider. I din specifika situation har du inte fullständig information och osäkerhetsinformation för båda objekten, men liknande begrepp gäller här (de antar i huvudsak vissa antaganden och kombinerar osäkerheten hos objekten).
För att försöka svara på din frågor mer direkt:
-
Jag antar att du frågar vilken minimiavstånd du (som operatör) ska tolerera. Detta är svårt att sätta ett specifikt värde på. Normalt får du en sannolikhet för kollisionsuppskattning och tilldelar en tröskel i det utrymmet, till exempel "något högre än 1e-4-sannolikheten för kollision och vi kommer att manövrera". När det gäller vilket avstånd som utgör en "träff" antar det som vanligtvis görs att båda objekten är sfäriska. Detta kan vara svårt om du inte vet så mycket om det andra objektet.
-
Se ovan för de grundläggande begreppen, men implementering kräver uppenbarligen kunskap om probabilistiska begrepp, omloppsdynamik och (helst) ange uppskattningstekniker.
Slutligen är detta mycket ett aktivt forskningsämne, och det finns ofta artiklar som beskriver ett "nytt" sätt att göra detta. Jag bör också nämna att även om det jag förklarade ofta görs i praktiken, finns det flera skäl att tro att det faktiskt inte ger en korrekt sannolikhet för kollisionsuppskattning.
Tyvärr är öppen litteratur om detta ämne gles, men att söka efter de författare som jag nämnde ovan, och faktiskt bara termerna "satellitsannolikhet för kollision" kommer att ge dig några mycket användbara träffar om du har rätt tillgång (AIAA journalpapper, till exempel).
Du kan dock uppskatta detta numeriskt istället för analytiskt med Monte Carlo-metoder. Här är ett snabbt och smutsigt sätt att göra detta:
-
Exempel från din "primära" satellit (den du fick konjunktionsrapporten för). För att göra detta, generera en 3x1 normalfördelad slumpmässig vektor med noll medelvärde och enhetsvarians ( standardnormalen. Ta nu din 3x3 kovarians för detta objekt, hitta dess Cholesky nedbrytning (du borde kunna hitta en rutin för att göra detta i ditt mjukvarupaket - "chol" i Matlab) och multiplicera det med din slumpmässiga vektor. Du har nu samplat ditt sannolikhetsutrymme.
-
Upprepa # 1 för det sammanhängande objektet. Men när du väl har provat måste du översätta varje punkt i enlighet med dess position, som ges till dig i RIC-koordinater. Lägg bara till din positionsvektor i slumpmässig vektor.
-
Beräkna avståndet mellan dina två prover. Spela in nämnda avstånd.
-
Upprepa steg 1 -3 för ett mycket stort antal prover (tänk på tiotusentals - i allmänhet ju mer desto bättre).
-
Nu har du en lista över "missavstånd". Det finns ett par saker du kan göra med detta, men en sak som är särskilt användbart är att konstruera en empirisk kumulativ distributionsfunktion. Du kan titta på hur du gör detta, men du borde kunna hitta en funktion för att göra detta i de flesta programvarupaket (i Matlab är det 'cdfplot'). Detta ger dig en plot som ser ut så här (endast med x> 0):
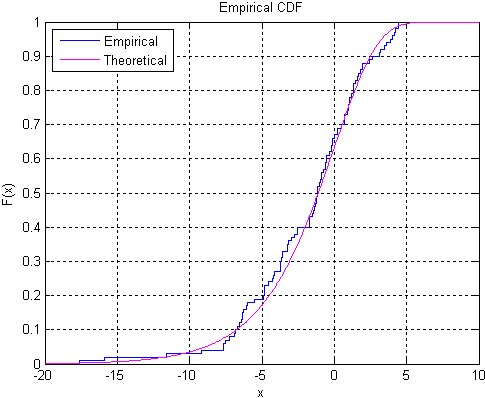
Nu, ett sätt du kan läsa detta är genom att välja ett "missavstånd" du är bekväm med (säg 20m) och hitta värdet på $ F (x) $ till detta värde på $ x $. Det är sannolikheten att du kommer inom 20 meter eller mindre från den kränkande satelliten. Om det är högre än något tröskelvärde som du har bestämt dig för med din ledning, börjar du den roliga uppgiften att planera en undvikande manöver. Om inte, vänta och titta. Alternativt kan du ange en sannolikhet som du är bekväm med och läsa av ett missavstånd som är associerat med det.
En sak du kommer att märka är att du verkligen är fokuserad på din tomts svans. .. och du kommer att se att för att få en jämn representation i svansen, behöver du en hel hel del prover. Så som sagt, ju mer desto bättre.
En sista sak: om du har följt dessa steg är sannolikhetsnumret du $ 1 \ sigma $. För, säg, en $ 3 \ sigma $ uppskattning, multiplicera bara dina två kovariansmatriser med din faktor (i det här fallet 3).